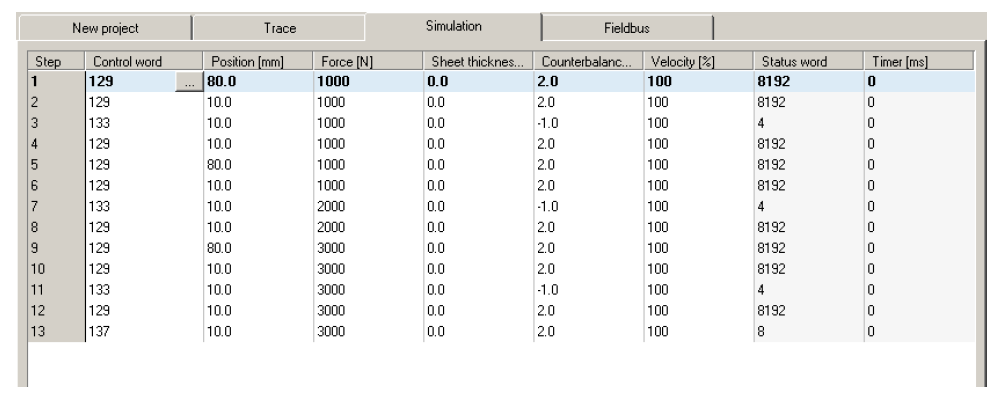
通过对控制字的操作,状态字的监控,模拟机器人完成一系列动作(动作之间还可自由延时),如下图的时序:大开至80mm—小开至10mm—1000N夹紧,平衡缸浮动为-1bar—小开至10mm—大开至80mm—小开至10mm—2000N夹紧,平衡缸浮动为-1bar—小开至10mm—大开至80mm—小开至10mm—3000N夹紧,平衡缸浮动为-1bar—小开至10mm—Homing。 浏览量2620赞分享 标签: 状态字Simulation控制字