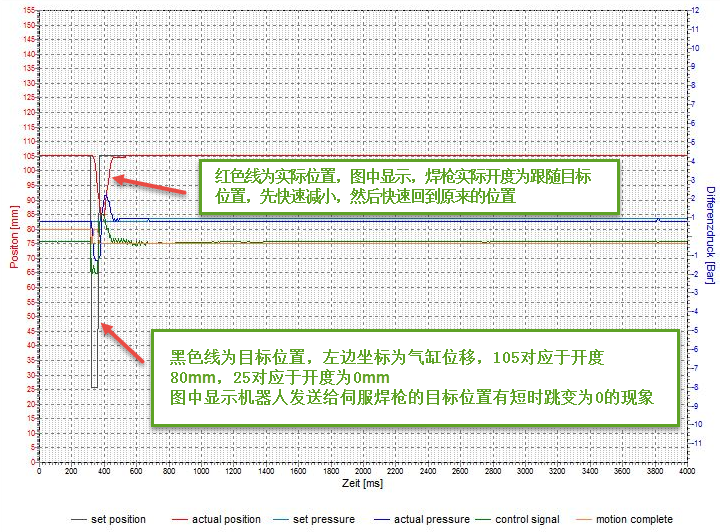
原因分析: 利用WinSPZ软件可以实现正常的定位、焊接动作;机器人操作的时候,利用WinSPZ采样相关信号,结果表明,焊枪控制器收到了目标位置为0的目标值,信号大概持续50ms左右,之后目标值又变为原始值,因此焊枪动极臂表现为:快速伸出,在50ms内还没有完全闭合,此时目标值已经变为原始值,动极臂又快速缩回。解决方法: 机器人发送了错误的位置信号导致。 浏览量1119赞分享 标签: 快速缩回采样快速伸出