应用背景:
CMMT-AS-MP驱动器加EMMT-AS电机带的单轴电缸。滑块上工装重量小于5kg,且需带坦克链和气管运动。
故障表现:
- 速度设定到200mm/s后就报位置跟随误差Position: following error(00126)。将跟随误差监控窗口值P1.463monitoring window值增大,从1mm调整到10mm,再运行报acceleration following error(00658)。
- 放低速度运行无报警,但是会超调0.1~0.2mm,到位之后3秒之内缓慢回调到准确的目标位置。
故障解决:
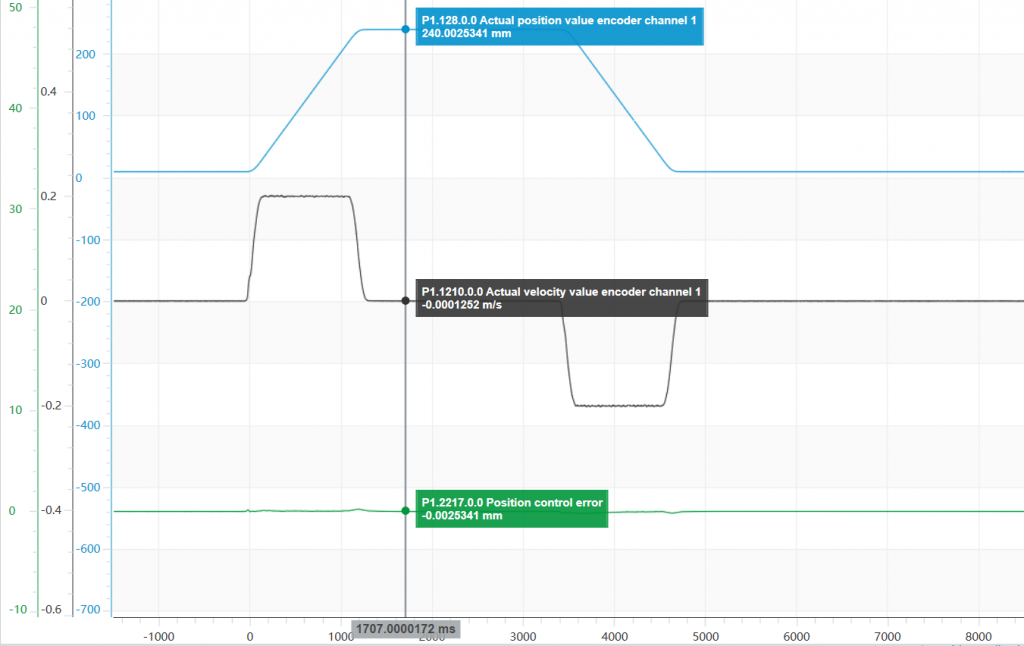
客户的应用中电缸滑块要承受一定的附加力,而且随着位置变化附加力会非线性变化。因此,首先要降低启停时的动态轮廓数据。原测试加减速度为5m/s²,jerk为150m/s³。加减速度降低到2m/s²,jerk为20m/s³测试,且保持跟随误差窗口值为10mm。测试结果:速度可达到客户要求的200mm/s而无报警,但是依然会有超调。下图为10mm到240mm之间运行的捕获数据。
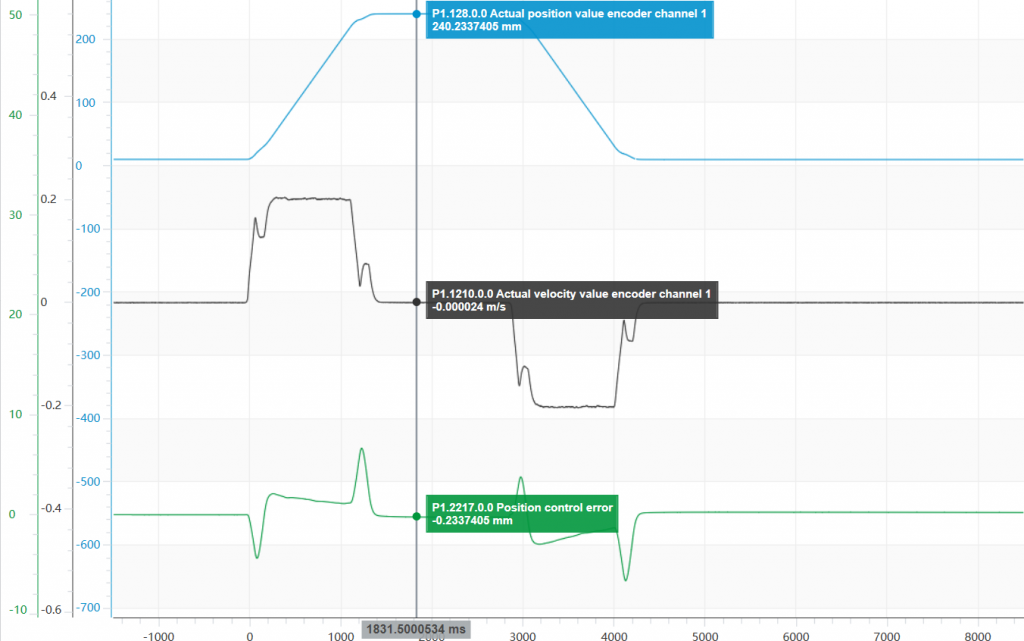
从图上可以看出,即使动态值调到很低,仍然出现了0.23mm的超调,且加速过程中速度曲线有明显波动,且最大跟随误差达到大约7mm。
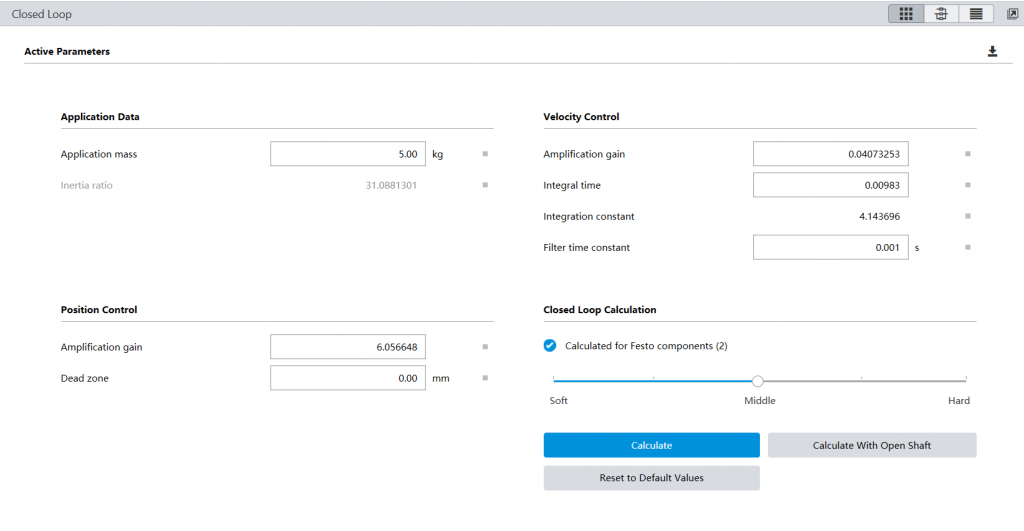
下一步,调节刚性增强电缸的抗干扰性。原来的闭环参数为默认值middle,参数如下图:
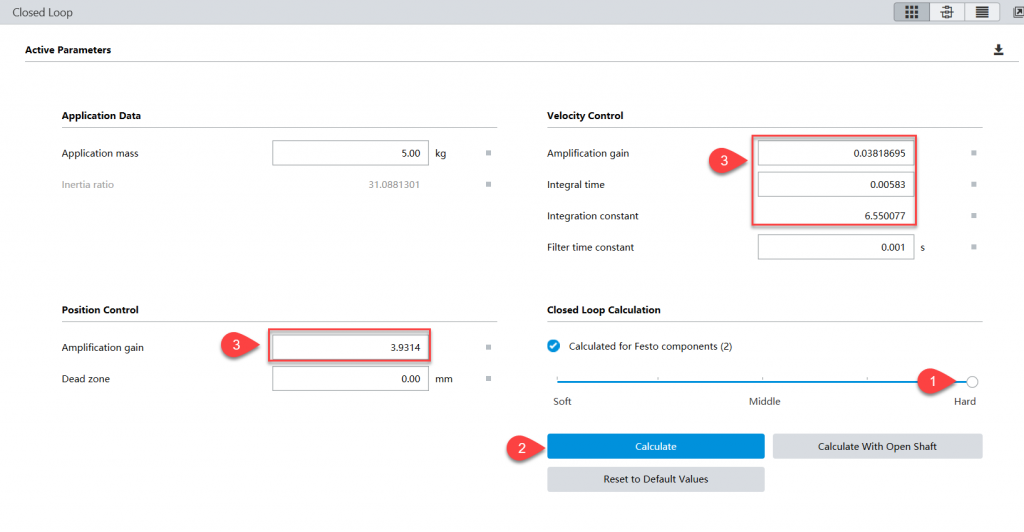
断使能的状态下,将刚性改为hard并计算,参数变化如下图:
再次运行,捕获参数曲线如下:
由上方曲线图可以看出,位置超调几乎为0。加速阶段速度曲线依然存在抖动,但是波动很小。而位置跟随误差始终小于1mm。用户提出的两个问题都得以解决。
